


|
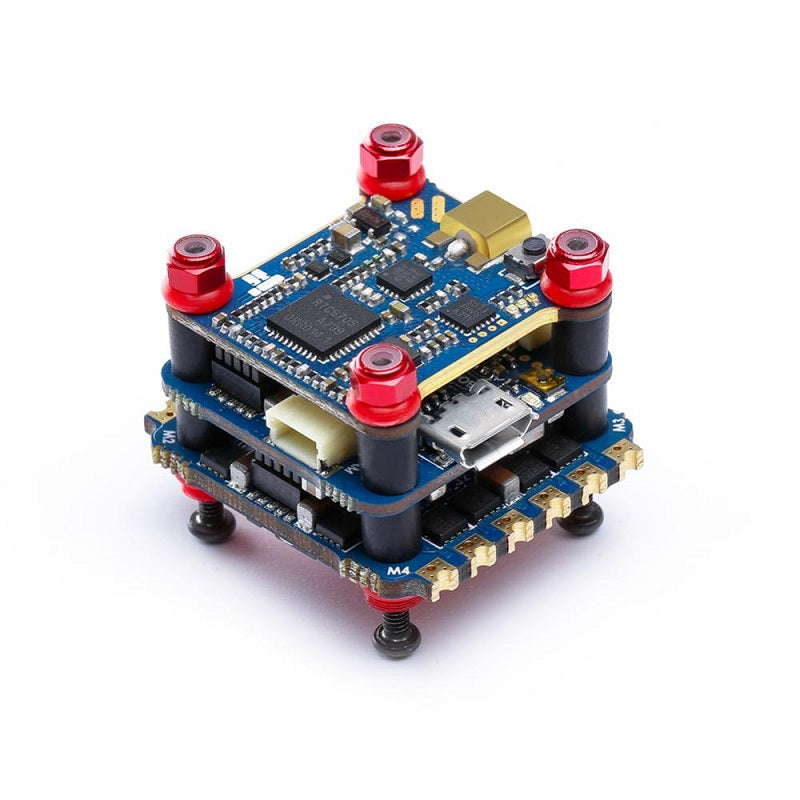
SucceX F7 TwinG // GYRO FUSION is the NEXT-GEN flight controller, ready for anything, with 5 uarts, 8 motor outputs, 32Mb blackbox and a powerful F7 processor to run it all. With it's clean intuitive layout, the SucceX F7 TwinG makes installation a breeze with a 4-pin connector for your VTx and an 8-pin connector that allows simple plug and play connection with your 4in1 ESC. However, the real magic of this flight controller lies in it's TWIN ICM20689 SPI GYRO configuration. The TwinG uses two identical gyros oriented side by side with one offset 90 degrees from the other. Betaflight uses GYRO FUSION to blend and average the information from both gyros to send a much cleaner signal to the PID loop controller! It features less noise and fewer oscillations across the throttle band without adding any delay! Betaflight software filters can be lowered in most cases bringing a significant decrease in delay giving that ‘locked-in” on quads for racing. With plenty of processing power from the F7 chip, and 5 uarts, this FC is also great for long-range GPS builds. On top of that, the TwinG configuration makes it the ideal FC for builds like macro quads, cinematic filming rigs and x-class racers that are a bit trickier to tune. Click here for UAV Tech's review or here for Albert Kim's review
Specifications :
Package include (pre-built as a stack) : 1 pc x SucceX F7 TwinG Flight Controller (Dual ICM20689) 4 pc x silicon grommets M4 to M3 1 pc x 8-pin 4in1 ESC harness 1 pc x 4-pin VTx harness
TwinG Gyro Setup in Betaflight CLi:
Click here for wiring diagram TR Tip: Take extra care when using the provided wire harness to connect a 4in1 esc to your FC. To avoid damaging the boards, before powering up, always double check that the wires are correctly connect to the respective pins on the boards, especially the positive and negative connection powering the FC. |
|||||||||||||||||||||||











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}